Remote vehicle operation has evolved significantly, transitioning from untethered manned submersibles (which put humans at risk) to remotely operated vehicles (ROVs) and unmanned underwater vehicles (UUVs), often referred to as autonomous underwater vehicles (AUVs), although they are not entirely autonomous.
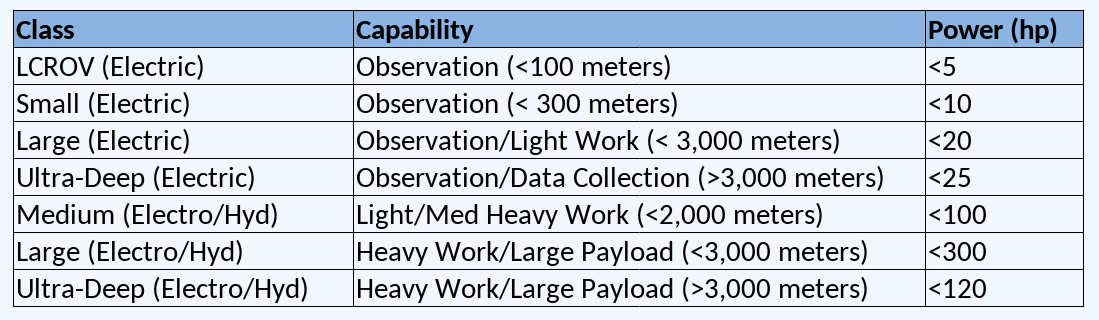
It’s the key for understanding the various applications of ROVs and their capabilities, for understanding the potential benefits and drawbacks of using ROVs, to make a decision about the specific characteristics/technologies of your future ROV and how it can be used.
The move to ROVs removed humans from direct risk, but the tether connecting them to a support vessel limited their scope. AUVs allowed surveys to be conducted faster, but they were unable to stop and perform detailed spot assessments if an issue was detected. A more recent development has been the emergence of FAST ROVs, which have become a popular tool, completely transforming the traditional pipeline inspection workflow.
These high-speed ROVs can survey at least twice as fast as a work-class ROV. They provide significant time savings and efficiency improvements in offshore operations, especially in areas such as seabed mapping and pipeline inspection.

Traditionally, standard work-class ROVs have had speed limitations due to their size, weight, and hydrodynamics, and they can be unstable when operating at higher speeds. In contrast, fast ROVs are designed to perform tasks faster and more efficiently, with top speeds of 6 knots and the ability to hold position in currents up to 4 knots from any direction.
By incorporating advanced sensor payloads, low-profile hydrodynamic packages, and advanced ROV control automation, fast ROVs can accurately navigate and remain stable at high speeds while close to the seabed. They can also be operated in free-swimming mode for shallow water and use a tether management system (TMS) in deeper water.
The adoption of fast ROV technology has revolutionized pipeline inspections, allowing for more efficient and cost-effective operations while maintaining high standards of safety and data quality.
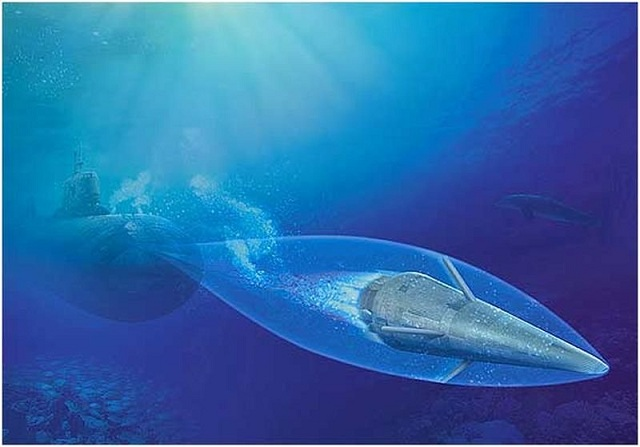
More and more companies are turning to the idea of paired ROV configurations. The paired element can be located on the ocean surface, in the water column, or on the seafloor.
These ROV usage scenarios are attempts to reduce the cost of operations, operating expenses, increase underwater time, improve positioning accuracy, and expand the service area.
A separate potential benefit of such an ROV deployment scheme could be the simplification of the ROV service sales business model, stemming from the above.
On the other hand, the overall system cost increase and the need for careful testing in real-world conditions are factors to consider.

Autonomous Underwater Vehicles (AUVs) are key players in the deep-sea operations and research market. These advanced vehicles facilitate rapid hydrographic surveys of the ocean floor, allowing researchers to gather critical data efficiently and effectively.
AUVs are becoming increasingly intelligent with each passing day, thanks to advancements in artificial intelligence and sensor technology. Additionally, their range of equipment continues to expand, enabling them to perform a wider variety of tasks and enhance our understanding of underwater environments. This evolution positions AUVs as indispensable tools for oceanographic research and exploration.
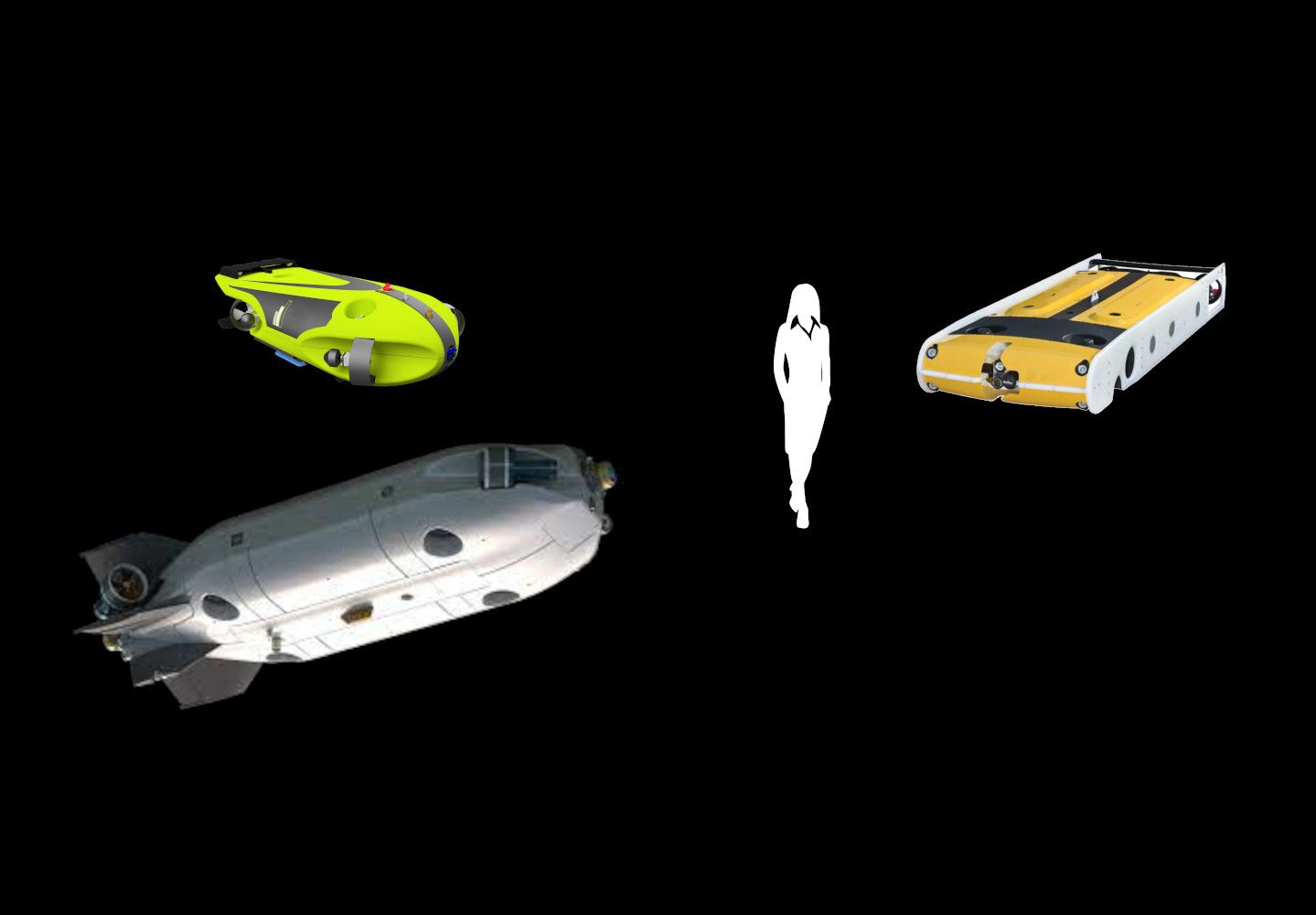
It looks like the line will gradually blur between Small Work Class ROV and Intervention AUV.