
In-Water Cleaning, Inspection, and Repair Services

Biofouling, the accumulation of marine organisms like algae, barnacles, and bacteria on submerged hull surfaces, poses significant operational and financial challenges for large vessels. Even minor microbial growth increases hydrodynamic drag, forcing vessels to burn 10-20% more fuel to maintain speed. This inefficiency directly escalates operational costs and greenhouse gas emissions, complicating compliance with environmental regulations such as the IMO’s Energy Efficiency Existing Ship Index (EEXI) and Carbon Intensity Indicator (CII).
Also, fouling clogs seawater intake systems (e.g., heat exchangers, pumps), reducing cooling efficiency and risking equipment failure. Regulators globally are tightening biofouling management requirements to curb invasive species transfer and emissions. The IMO’s Biofouling Guidelines (MEPC.378(80)) mandate proactive hull inspections and cleaning protocols, while regional frameworks like Australia’s Biosecurity Act 2015 penalise non-compliance.
However, traditional dry-dock cleaning cost up to millions of dollars and disrupting operations for 10-14 days.
Regular removal of biofouling is essential to prevent more severe and expensive issues in the future.

In-Water Hull Maintenance Services
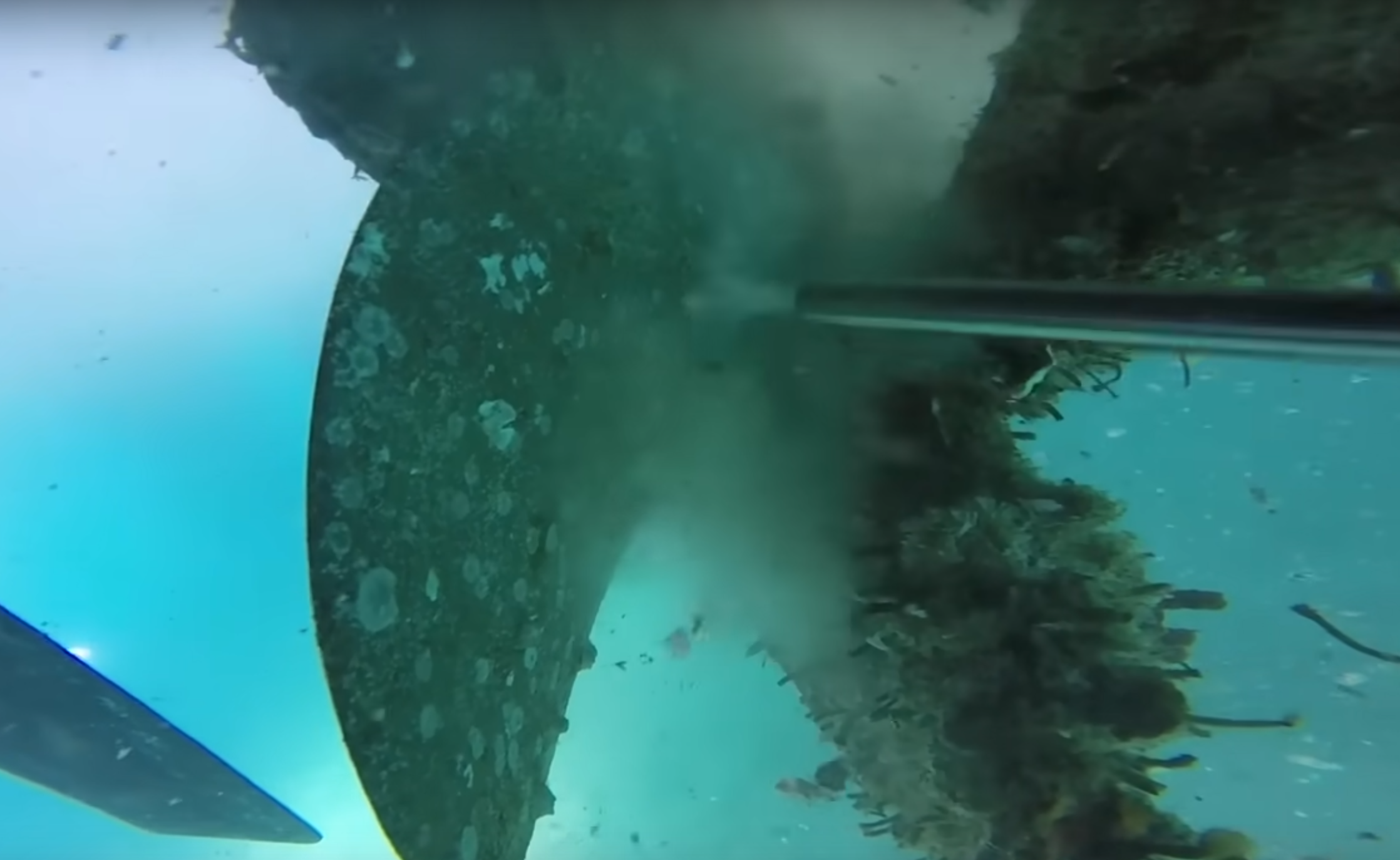
The Crab robot moves over the vessel hull and removes biofouling with a high-pressure cavitation water cleaning tool that uses seawater. The cleaning speed is about 2,000 m²/h on flat surfaces.
Cavitation cleaning causes minimal damage to surface coatings compared to other techniques and provides no water contamination from microplastics, as it doesn't use plastic brushes. The removed biofouling can be collected to comply with the requirements of the IMO and local regulators.
Non-destructive testing of the steel surface, approximately 100 m²/h (depending on the number of data points collected), can include ultrasonic testing, visual inspection (cameras), and cathodic protection (CP) testing.
Salt treatment. Deionized water is injected into a fixed volume, and the salt content is measured after a set period. This method is typically used to assess the salt content in materials or structures for corrosion evaluation, identification of weaknesses, and performance prediction.
All data will be provided with relative coordinates. The necessary sensors are mounted on the Crab robot and are insulated to protect them from water and mechanical damage.
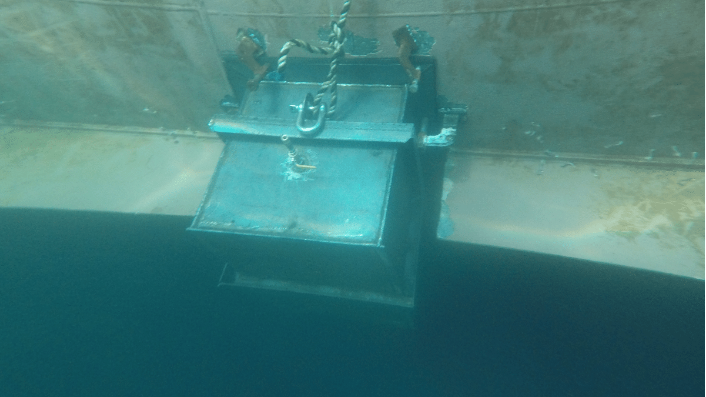
Mobile cofferdams are installed using one or multiple robots (2,000 - 6,000 kg). The cofferdam is equipped with repair tools for a mini-workshop, including CNC machinery.
All coatings are removed down to the base metal, and water is extracted. Clad welding restores the surface thickness by adding new metal layers. Grinding is then performed.
Corrosion-resistant coatings and cathodic protection systems are applied to protect the surface. Thickness gauging of new coatings is carried out.
For emergency temporary repairs, structural clamps with elastomeric sealsare used to seal off damaged areas. Reinforcing plates are installed and welded to strengthen the structure.
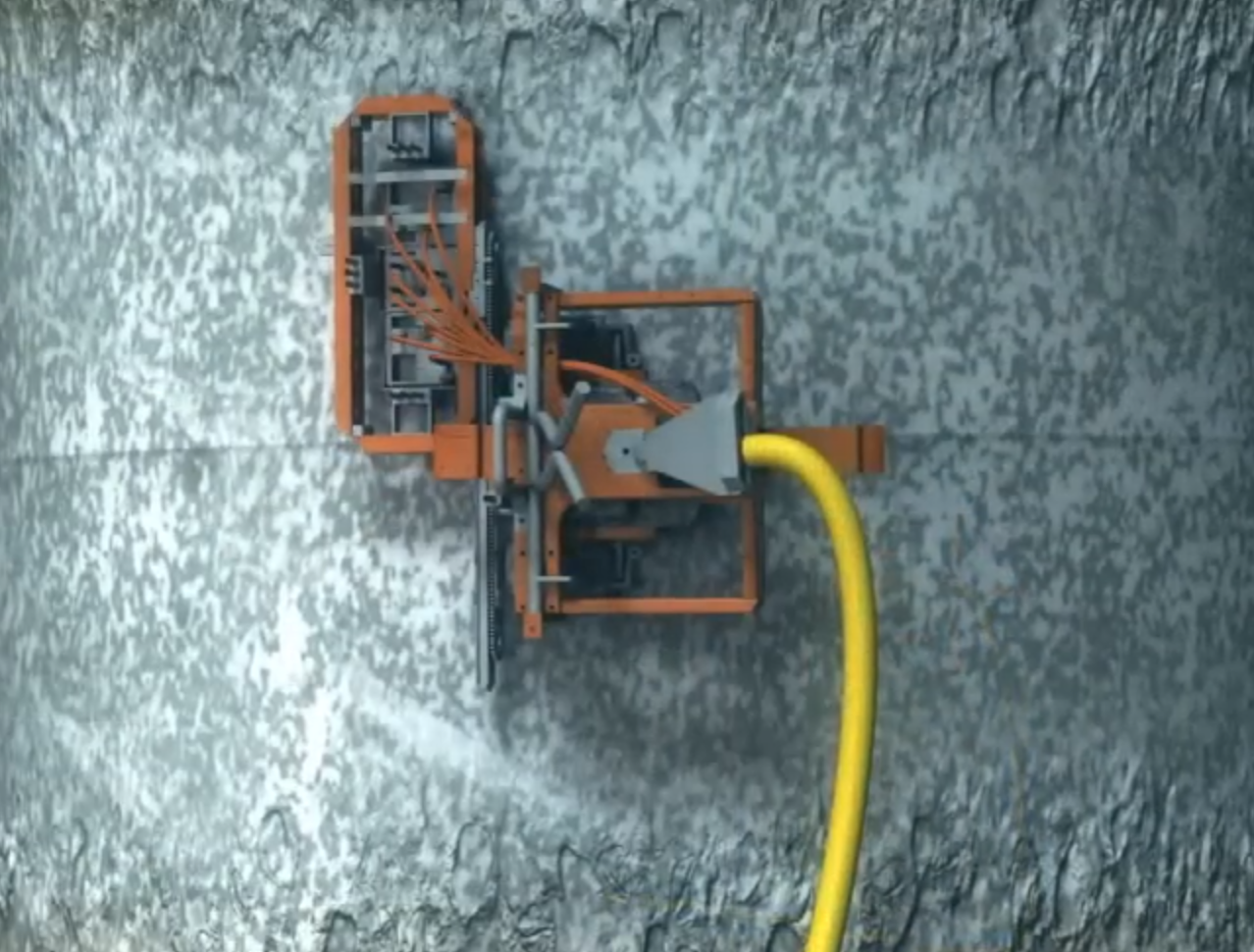
Heavy-duty magnetic crawler robot for harsh environments. Exceptionally robust hold on steel surfaces.
The Crab Light platform is a robotic system designed to perform various vessel maintenance tasks underwater with the lightweight equipment (up to 1,000 kg), even in the harshest environments.
The Crab robot operates on any large steel magnetic surface, securing itself with magnets on its six legs. It moves along the vessel’s hull both above and below the waterline, reaching depths of up to 150 meters.

Here you can see our Crab Light Robot walking

… and spraying

We are now teaching it to work underwater and spray with a high pressure.
| Specification | Details |
|---|---|
| Securing | The Crab robot is secured to metallic surfaces with magnets in its legs. Each magnet provides a holding force of 333 kg to the vessel’s hull. |
| Operating Surfaces | Flat steel surfaces, fixed steel platforms, and jack-up rigs. |
| Movement | 33m per minute (2 km/h) on clean surfaces |
| Depth | Up to 150m (upgradable to 1500m). |
| Wave Tolerance | Up to 3.5m Hs (potentially higher). |
| Wind Resistance | Storm wind 100 km/h |
| Temperature Range | -5°C to +60°C (upgradable). |
| Weight | Less than 300kg. |
| Payload Capacity | Up to 1000kg. |
| Size | 100 x 100 x 50 cm. |
| Navigation | Onboard cameras, visual and inertial navigation systems, and 3D model-based position verification. |
| Specification | Details |
|---|---|
| Securing | The Crab robot is secured to metallic surfaces with magnets in its legs. Each magnet provides a holding force of 1б000 kg to the vessel’s hull. |
| Weight | 900kg. |
| Payload Capacity | Up to 3000kg. |
| Size | 170 x 170 x 70 cm |
All other specifications are identical to those of the Crab Light.
Please share your ideas and requirements with us